
CoppeliaSim 로봇 시뮬레이션 플랫폼
CoppeliaSim은 분산 제어 아키텍처를 기반으로 한 다기능 로봇 시뮬레이션 플랫폼으로, 구체화된 지능 분야에 초점을 맞추어 구체화된 지능체의 전 과정 테스트와 검증을 완료할 수 있으며, 감지 알고리즘 원형 개발, 운동학 설계, 디지털 트윈 생성 및 강화 학습 훈련을 포괄합니다.
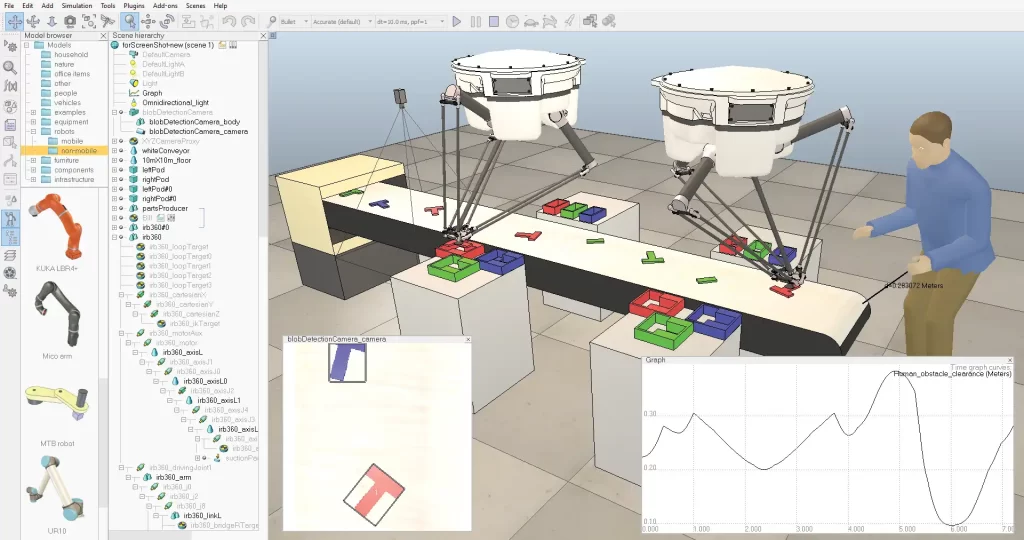
플랫폼은 ‘작성-조합-시뮬레이션’ 전 과정을 지원하여 실제 물리적 상호작용과 다중 모달 감지 장면을 정확하게 시뮬레이션할 수 있으며, 인간 형상, 로봇 팔 등 다양한 맞춤형 지능형 모델 개발 요구에 적합합니다. 주류 프레임워크와 ROS/ROS2 생태계를 원활하게 연결하여 연구 개발 주기를 크게 단축하고 실행 비용을 절감할 수 있습니다.
핵심 기능
다중물리엔진
MuJoCo/Bullet Physics 등 5가지 물리적 엔진이 내장되어 있습니다. 충돌, 잡기, 소프트웨어 상호작용, 로프 천 등 실제 물리적 장면을 정밀하게 시뮬레이션합니다.
정역운동학
분기, 폐쇄 루프, 중복 자유도 및 중첩 회로 등 임의의 기구의 운동학적 솔루션을 지원하며 임베디드 가능한 알고리즘 모듈 제공
고정밀 센서 시뮬레이션
정확한 볼륨 접근 센서 및 시각 센서 시뮬레이션을 제공하여 이미지 처리 및 플러그인의 유연한 확장 지원, 그리드, 점군 등의 포맷 지원
유연한 경로 및 운동 계획
OMPL 라이브러리 캡슐화 기반 플러그인으로 고도로 유연한 경로 계획 및 모션 계획 기능 제공
API 및 다국어 지원
파이썬, 루아, C/C++ 등 7개 프로그래밍 언어 커버, ROS, ZeroMQ 등 통신 방식 호환 5가지 프로그래밍 모드 지원
고효율 충돌 및 거리 계산
그리드, 옥타브 트리, 점 구름 등의 조합 형태의 충돌 검출을 빠르게 완료하여 임의의 그리드, 옥타브 트리, 점 구름 간의 최소 거리를 정확하게 계산
풍부한 플러그인과 추가 기능
트랙 생성, 사용자 정의 사용자 인터페이스, 컴퓨터 비전, 컴퓨팅 지오메트리 등 다양한 기능 플러그인을 제공하여 다양한 포맷의 가져오기 및 내보내기 지원
더 많은 특징 기능
웹에서 다단계 실행 취소/재실행, 동영상 녹화 기능을 지원합니다. 분무 또는 용접 궤적을 시뮬레이션할 수 있으며 옥타브 트리, 점군 데이터 처리 호환
응용 장면: 지능형 본체 개발과 프로토타입의 빠른 반복
응용 시나리오: 복잡한 작업 전략 훈련 및 가상 배포 검증
제품 선택
CoppeliaSim
기본판
만능 편집 능력
전체 에뮬레이션 기능 지원
상업용도허가
고객 패키지 배포 지원
CoppeliaSim
전문판
만능 편집 능력
전체 에뮬레이션 기능 지원
상업용도허가
CoppeliaSim
교육면
교육용도에 한함
만능 편집 능력
전체 에뮬레이션 기능 지원
상업용도허가
지원 서비스
자주 묻는 질문
제품 관련 궁금한 점이 있으신가요? 필요한 정보를 빠르게 찾아보세요.
전문 기술 서비스
종합적인 제품 교육 및 기술 서비스를 제공하며, 전문 인력이 프로젝트를 신속하게 시작할 수 있도록 지원합니다.
관련 솔루션
전문적인 데이터 서비스 및 솔루션은 다양한 시나리오의 테스트 요구 사항을 충족합니다.