
ADTF
——첨단 운전자 지원 시스템(ADAS) 및 자율주행 시스템 개발을 위한 포괄적인 소프트웨어 프레임워크
기능소개
토털 솔루션
ADTF는 신속한 프로토타입 설계, 시뮬레이션, 데이터 레코드 및 검증과 같은 핵심 기능을 포함하여 ADAS 및 자율주행 시스템에 대한 포괄적인 개발 솔루션을 제공한다.
모듈러 아키텍처
ADTF는 모듈러 아키텍처를 채택하여 개발자가 소프트웨어 구성 요소를 쉽게 통합 및 재사용할 수 있도록 하는 동시에 플러그 앤 플레이 소프트웨어를 지원하여 다양한 하드웨어 구성에 적용할 수 있다.
데이터 기록과 재생
ADTF는 센서 데이터 및 통신 데이터를 포함한 다양한 데이터 스트림을 기록하여 후속 데이터 분석 및 재생을 용이하게 하고 시스템 검증 및 개선에 도움이 된다.
환경감지 및 차량상태 평가
ADTF는 각종 센서 데이터를 처리할 수 있는 능력을 갖추고 있어 정확한 환경 감지와 차량 상태 평가가 가능하여 ADAS 기능 개발에 중요한 도구이다.
실시간 모니터링 및 분석
ADTF는 강력한 실시간 모니터링, 분석 및 기록 기능을 제공하여 개발자가 시스템 성능을 평가하고 알고리즘 디버깅을 수행하도록 지원하며 시스템의 신뢰성과 안정성을 보장한다.
빠른 프로토타입 제작
ADTF를 통해 개발자는 빠르게 프로토타입 설계와 ADAS 기능 테스트를 하고 개발 주기를 가속화하며 개념에서 실제 적용까지 보다 효율적으로 수행할 수 있다.
표준화 지원
ADTF는 CAN, CAN FD, FlexRay, XCP, Some/IP, 자동차 이더넷/AUTOSAR 등과 같은 다양한 자동차 표준을 지원하여 자동차 전자 시스템과의 상호 운용을 보장한다.
확장성
ADTF는 확장성이 높으며 개발자는 변화하는 개발 요구 사항에 맞게 특정 요구 사항에 따라 새로운 기능 모듈과 알고리즘을 추가할 수 있다.
다중 플랫폼 지원
ADTF는 x64 및 ARM64를 포함한 다양한 플랫폼에서 작동할 수 있으며 Linux 및 Windows와 같은 여러 운영 체제를 지원하여 유연성이 더 뛰어나다 .
ADTF 아키텍처
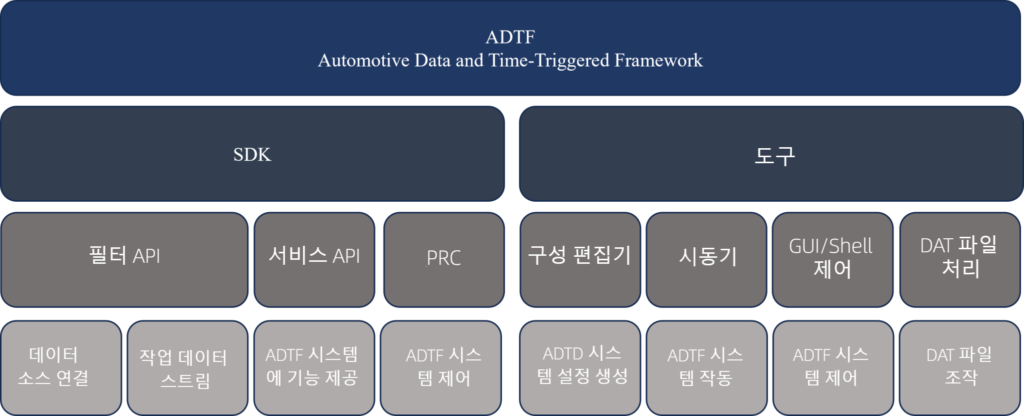
추천 소프트웨어 버전 ≥ADTF3.14.0
ADTF 소프트웨어 기능
- 사용하는 도구와 adtf plugins의 조합(헤드리스, UI)
- 생방송, 다시보기(실시간 이상) 또는 녹화모드(스트리밍 량, 멀티레코더 등)
- ADTF Launcher 단독 사용,
- 제3자 도구 또는 여러 인스턴스/분포식 설정과 함께 사용
- 빈 기기, 바탕화면, 도커, 클라우드 또는 가상 영상
- adtfgraph 구성 요소의 조합, 합계, 내포
- 불러온 메타(xml) 파일 내의 데이터 구조의 수량과 내포
- 처리 샘플의 데이터 크기, 수량, 속도
- 처리 및 디코딩을 요청한 서브 스트림 량
- 단일 스레드 또는 다중 스레드 방송
- CPU/ 코어/ 스레드 관련 라이브러리
- 장치의 딜레이 시간, 사용 가능한 대기열, 버퍼 존
- 판독 기록 Input/Output 데이터
- UI 알고리즘과 조작을 위한 GPU
하드웨어 요구사항
- 설치할 소프트웨어를 지원하는 하드웨어 설정
- 최소 하나의 싱글 코어 프로세서 또는 1GHz의 SoC
- 표준 구성 요소를 포함하는 기본 도구와 내포되지 않은 기본 그래픽에 최소 2GB RAM 사용
디스플레이
- 풀HD(권장 해상도) 모니터 사용
지원 플랫폼(추천)
- 지원되는 플랫폼: Windows 64 Bit platform 지원(e.g.Windows 7or11)
- 요청 : 런타임 –
1、Visual C++ 2019 Redistributable
2、Visual C++ 2019 / Visual C++ 14.2 (for
debug libraries and executables)
개발시–
1、Visual C++ 2019 (at least CXX Compiler
MSVC 19.29) / Visual C++ 14.2 (VC142 Toolchain at least 14.29)
2、MSBuild Version 16.x (at least 16.11)
3、MSBuild Tools only or full Visual Studio
IDE installation which covers this
requirements
4、Windows Kit 10 (at least 10.0.19041.0)
5、CMake ≥ 3.23.2 - ADTF delivery package의 디스크 공간: 4GB
- 지원되는 플랫폼: Fedora,Debian 등 기타 배포 버전 지원
- 요구 사항:
1、gcc ≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils libglib2.0-0 libxcb-xinerama0 xterm - ADTF delivery package의 디스크 공간: 6GB
- 지원되는 플랫폼: Fedora,Debian 등 기타 배포 버전 지원
참조 하드웨어는 nVidia Jetson TX2 보드(예: nVidia Drive PX 2 또는 Jetson AGX XAVIER 호환) - 요구 사항:
1、gcc≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0 - ADTF delivery package의 디스크 공간: 4GB
시스템 개발 및 응용
빠른 모형 설계
ADTF는 센서 및 카메라 데이터를 시각화하는 시스템을 개발할 수 있다. 이 시스템은 ADTF의 기능을 통해 카메라 데이터, 신호 및 디버깅 정보를 연결하고 시각화할 수 있다.개발자는 이 시스템을 사용하여 ADAS/AD 기능 개발을 검증할 수 있다.
예를 들어 ADTF에서 제공하는 2D 및 3D 시각화 기능을 사용하여 차선 감지 알고리즘이나 승객 인식 기능의 신뢰성을 확인할 수 있다.
데이터 레코드
주문자상표부착생산(OEM)의 측정 기술을 지원하고 ADTF를 센터 유닛으로 개발한다. 후속 오프라인 분석 및 재현 실험을 위해 통합 및 확장 도구를 사용하여 센서 데이터, 버스 데이터 및 디버그 인터페이스에 의해 기록된 원시 데이터 흐름에 대한 접근, 디코딩, 처리 및 시각화를 용이하게 한다.
시뮬레이션
ADTF 소프트웨어는 AUTOSAR 소프트웨어 구성 요소의 통합 및 테스트를 지원한다.AUTOSAR 소프트웨어 구성 요소를 테스트하기 위한 솔루션을 제공하기 위해 AUTOSAR 보조 도구가 개발되었다.이러한 구성 요소는 복잡한 잔류 버스 시뮬레이션 없이 ADTF를 통해 직접 액세스하고 테스트할 수 있다.
뒤처리
고도로 확장 가능한 데이터의 검증 통과를 실현할 수 있다.프레임워크는 데이터 분석 및 검증을 위해 다양한 도구를 연결하거나 데이터 스트림을 구성할 수 있다.다양한 데이터 처리 요구를 충족시키기 위해 풍부한 응용 프로그램, 서비스 및 인터페이스를 제공하고 차량용 자원에서 효율적으로 운영할 수 있다.

